人形机器人核心部件中滚动轴承的应用及其数量
作者:高可 | 来源:原创 | 时间:
随着科学技术的飞速发展,人形机器人已不再是科幻电影中的专属;它们正逐渐走进现实生活,应用范围也从工业生产扩展到家庭服务。在人形机器人众多复杂且精密的部件中,有几部分被视为核心,对机器人的性能至关重要。它们就像人类的“骨骼和肌肉”,支撑并驱动机器人完成各种复杂动作。

线性执行器(14个关节),线性执行器将旋转运动转换为线性运动,用于手腕、肘部、膝盖和脚踝等关节,以及需要线性运动的组件,主要模拟肱二头肌和大腿肌肉等肌肉的收缩和放松,由无框架扭矩电机、滚柱螺杆、扭矩传感器、编码器和轴承组成。
旋转执行器(14个关节),即旋转关节,用于肩部和臀部等关节,以及需要旋转的组件,主要模拟一些人体关节的旋转运动,由无框架扭矩电机、减速器、扭矩传感器、编码器和轴承组成。
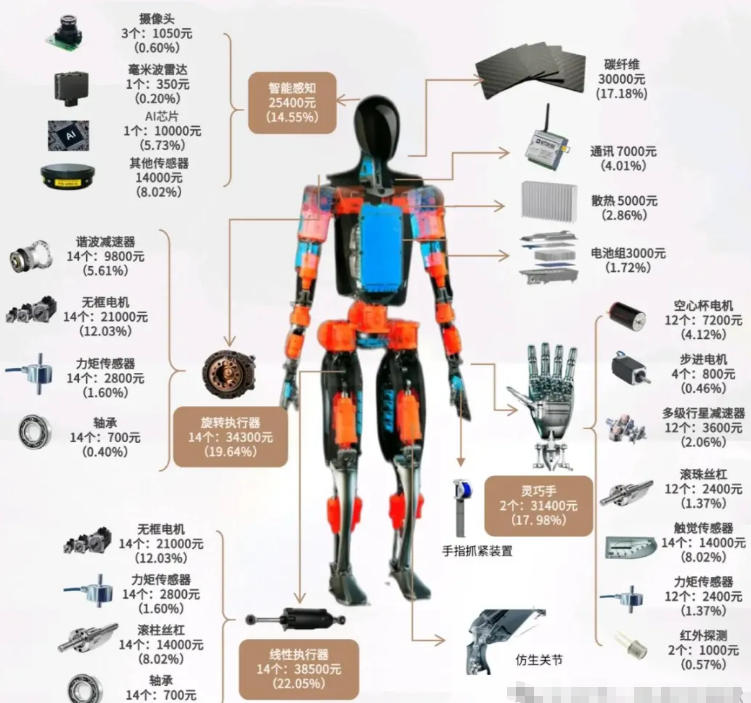
灵巧的双手(两个单元,包含12个关节),作为末端执行器,它们模仿人手的结构和功能,由无芯电机、减速器、丝杠、肌腱和触觉传感器组成。
执行器组件(关节模块),集成“运动引擎”,人形机器人依靠轴承进行关节连接,直线关节通常使用深沟球轴承和四点接触轴承,而旋转关节通常使用角接触轴承。